Xin chào các bạn! Đã đến lúc bắt đầu hành trình khám phá những điều mới rồi! Hãy bắt đầu cùng Rover nào.
Hiểu được cách điều khiển động cơ để di chuyển cơ bản.
Động cơ là bộ phận giúp Robot Rover có thể di chuyển (tới, lùi, rẽ,…) cùng với tốc độ tùy chỉnh.
Rover có 2 động cơ bên trái và bên phải, để Rover di chuyển, chúng ta cần điều khiển 2 động cơ này
Khối lệnh bắt đầu chương trình:
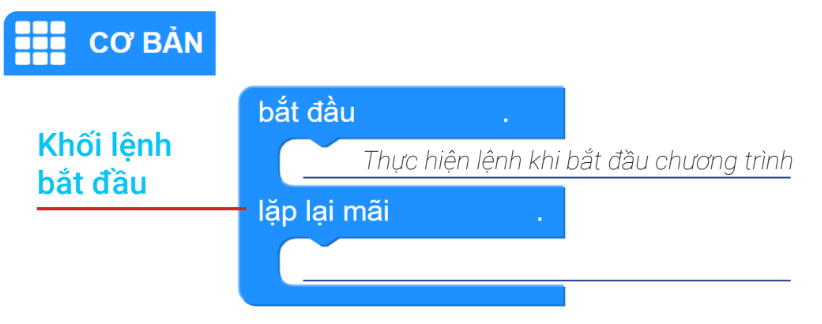
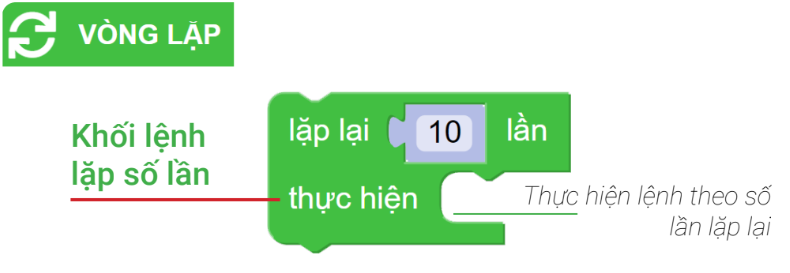
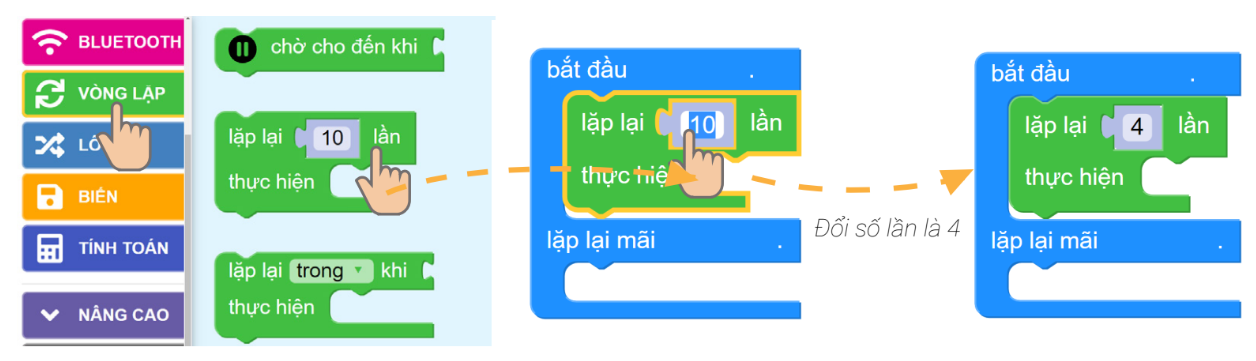
Khối lệnh lặp lại số lần:
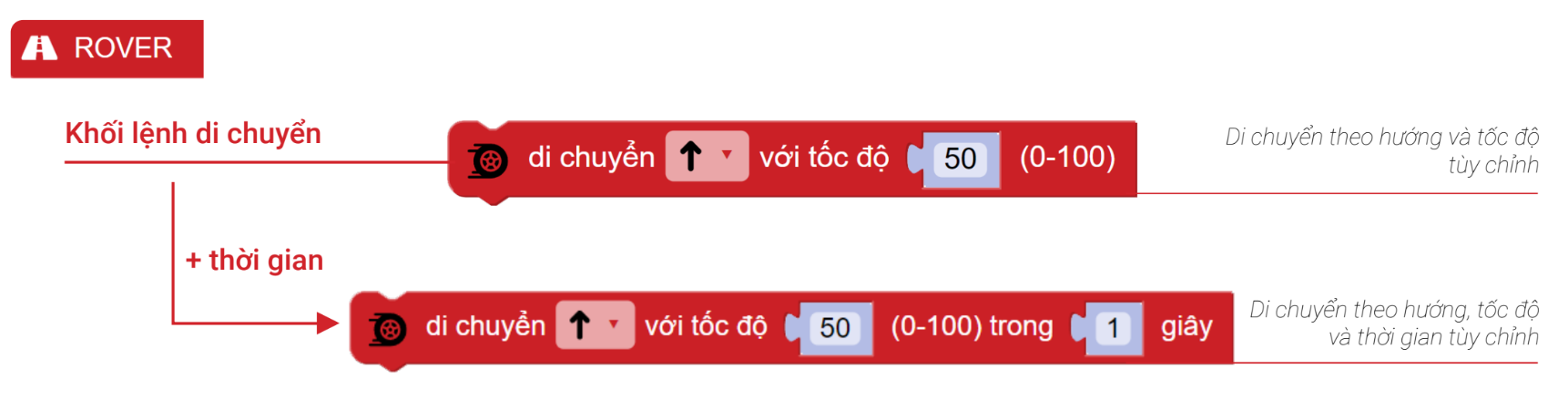
Khối lệnh di chuyển:
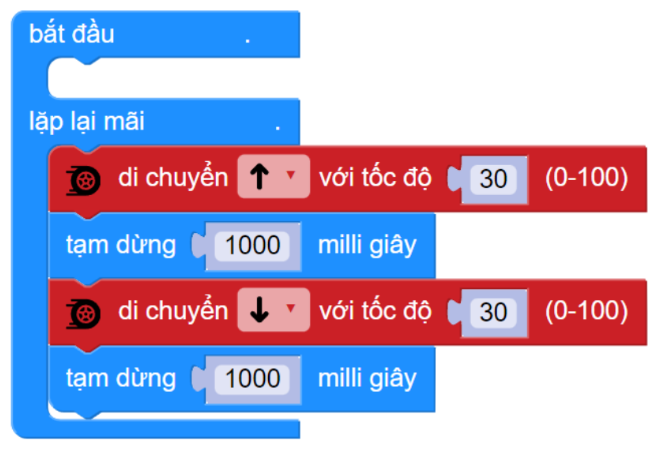
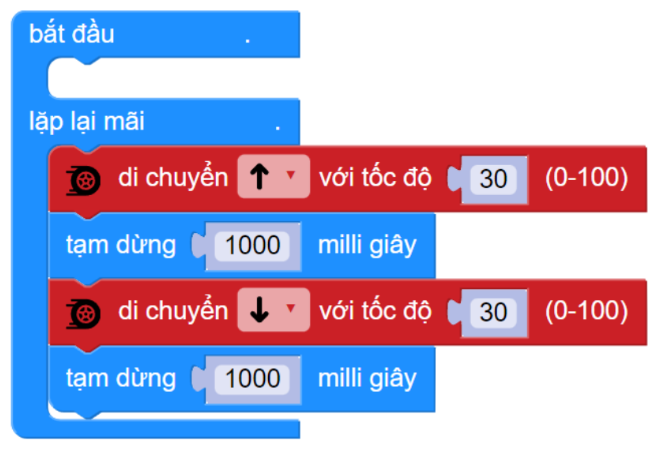
Chương trình đơn giản: Đây là chương trình điều khiển Rover đi tới và lùi, giúp bạn làm quen với lập trình điều khiển Rover di chuyển
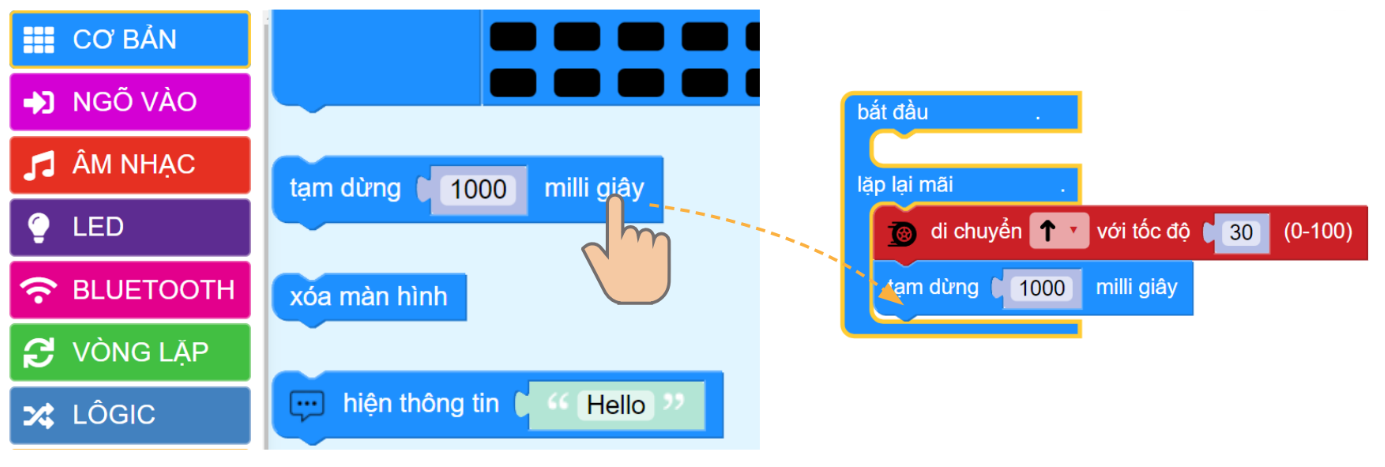
Gắn khối lệnh di chuyển vào lệnh lặp lại mãi
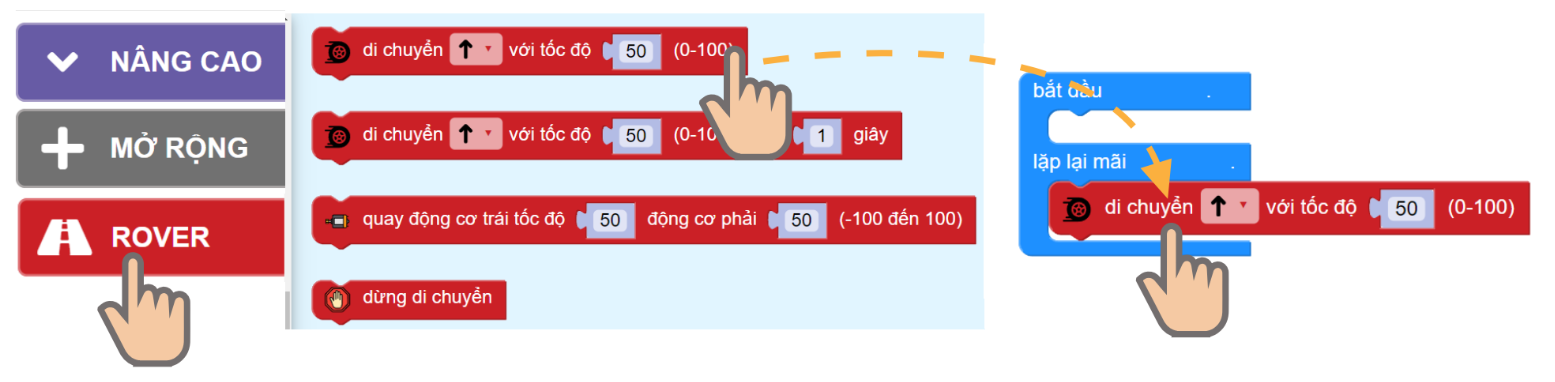
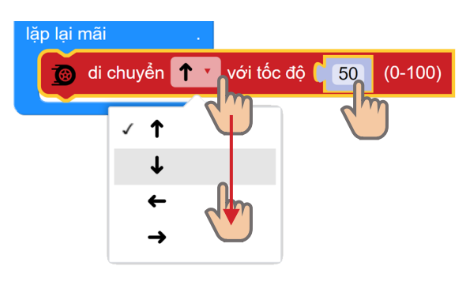
Chọn hướng di chuyển và chỉnh tốc độ mong muốn
Có 4 hướng di chuyển: tiến tới, lùi lại, rẽ trái, rẽ phải tương ứng với hình dạng mũi tên.
Tốc độ của động cơ có giá trị từ 0 (đứng yên) đến 100 (tối đa).
Thêm khối tạm dừng 1 giây (1000ms)
Làm tương tự để tạo thêm lệnh đi lùi trong 1 giây
Chạy chương trình
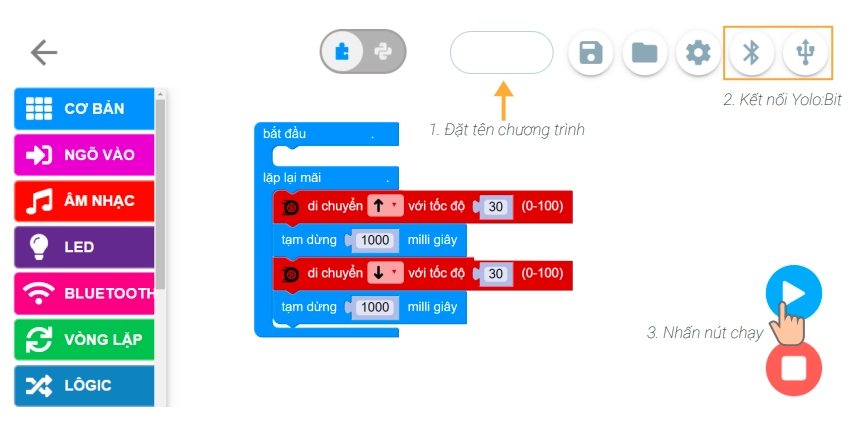
Bạn có thể nhấn nút tạm dừng để dừng chương trình lại
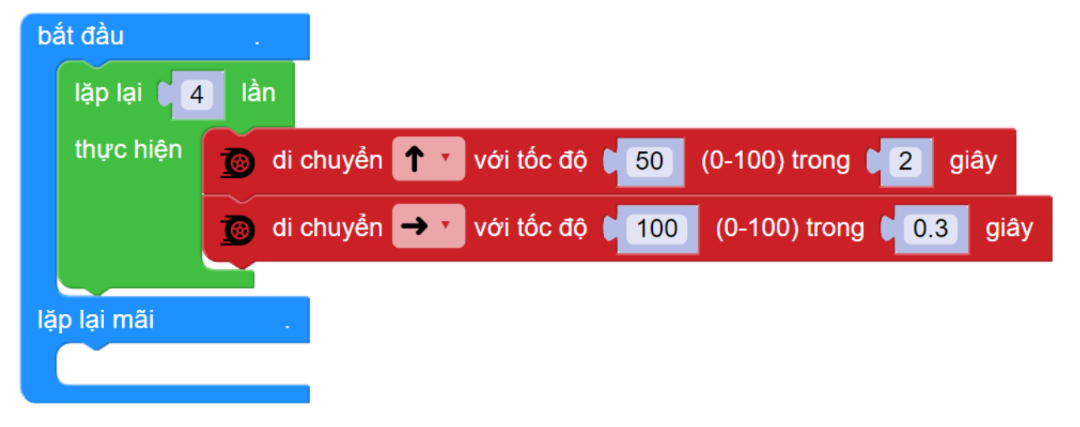
Chương trình di chuyển với thời gian: Chương trình này sẽ giúp Rover đi theo hình vuông
Gắn khối lệnh lặp số lần vào lệnh bắt đầu
Sử dụng các khối lệnh di chuyển để hoàn thiện chương trình như hình minh họa (để ý các thông số)